神奇的电子慧眼──机动车超速自动监测系统综述
近年来,随着我国道路交通事业的快速发展,特别是城市机动车数量剧增,带来许多交通问题和安全隐患。为此,公安交通部门在近些年加大了对非现场处罚设施的投入,而机动车超速自动监测系统就是其中之一。机动车超速自动监测系统俗称“电子眼”或“电子警察”,是测速技术和图像采集技术的有机结合,通过对监测车道内机动车行驶速度的实时、自动测量,对超速违法的机动车辆图像(含车辆牌号、车型等)进行拍摄,自动记录车辆行驶时的速度、车辆图像、日期、时间、地点等相关信息,因此具有超速监测和执法取证的双重功能。它的出现,极大地缓解了交通管理中警力不足的问题,在一定程度上遏制了超速事故的发生。
机动车超速自动监测系统主要有雷达监测系统、激光监测系统、地感线圈监测系统以及视频监测系统等。雷达监测系统和激光监测系统测量的是瞬时速度,地感线圈监测系统和视频监测系统测量的是平均速度。为方便大家了解,下面对不同的监测系统原理及性能进行简单介绍。
1 雷达测速
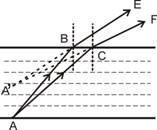
雷达为英文Radar一词的译音,意思是无线电探向和测距。雷达用于测速主要是应用了多普勒原理:当一定频率的雷达波束射到移动目标时,携带的目标速度信息的反射频率与发射频率不同,两者之差为多普勒频率。多普勒频率与目标的移动速度成正比。当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线方向而去时,反射信号频率将低于发射机频率。使用雷达测速对角度的要求较高,测速系统正对运动物体的移动方向,当测速角度小于5°时,对测量结果的影响不大于1km/h,通常可以忽略不计;否则,应对角度带来的Cosine效应进行修正,以保证测量结果的准确可靠。对于固定安装在道路上方,以一定角度俯视单一机动车道的检测系统(如图1所示),设计时需要考虑安装角度带来的影响,对测量结果进行修正。这种悬挂设计在车流量较小的公路上可以对单车道进行监测,安装时需要搭设龙门架。
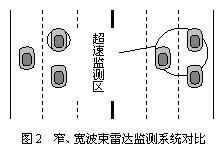
目前,使用较多的是一种窄波束高性能雷达,它的波瓣角约在4°到6°之间,测速时间可以达到几十个毫秒,较早期宽波束雷达更适于对单车道超速情况进行监控。宽波束雷达的雷达波发射锥角度一般在10°到30°之间,扫描面比较宽,监测区域比较大,当相邻车道两车并排进入超速监测区域或同车道两车相继进入超速监测区域时,雷达监测系统无法确认哪一部车违章,很容易造成误判,图2是宽、窄雷达之间的对比。宽波束雷达的测速时间为几百毫秒,因此,车速较高的车辆经过检测区域一段距离后才能检测出它的速度,这时已来不及捕捉其图像信息,从而造成漏抓或误抓。
2 激光测速
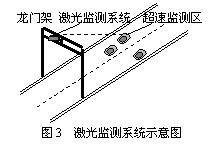
激光测速设备采用红外线半导体激光二极管发射出一定频率极窄的光束精确瞄准目标,通过测量光波在激光设备和目标之间的传送时间来确定目标速度。以固定的时间间隔发射两个脉冲,即可测得两个距离,将此两距离之差除以发射时间间隔即可得到目标速度。在理论上,发射两次脉冲即可测得速度。而实际应用中,为避免错误,激光测速设备在1秒钟内发射上千组脉冲波,以最小平方法计算平均值获得目标速度。测速时间可达几毫秒至几十毫秒,相比雷达具有更高的准确度;同时,其发射锥角只有不到0.1°,能避免两辆车被同时监测到的情况(如图3所示)。
与雷达监测系统相比,激光测速具有测量速度快、监测目标准确、测速准确度高等优点,在两车道车辆并行或车辆连续进入监测区域时,可有效的得到车速。此外,由于激光二极管发射频率很窄,其监测器极易收到精确的波长,因此在日间有强烈阳光时仍然能正常工作。相对雷达测速设备,激光测速设备价格较高。
[1] [2] 下一页