3 地感线圈测速
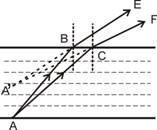
地感线圈测速一般用到两个线圈,两线圈之间的区域为超速监测区域。当机动车进入第一个线圈时由于电磁感应,触发计时器开始计时,走出第二个线圈后计时结束。两线圈之间的距离除以产生电磁感应的时间即可算出车速(如图4所示)。有时为提高测速准确度,可加入第三个线圈,取得车辆经过各个线圈的平均值作为测量值。
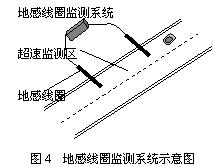
该系统因没有更多高智能化的设备且能获得比较高的捕获率,因此性价比较高。但是在安装时会破坏路面,影响路面寿命,且线圈在地下容易受损,使用2~3年需要更换线圈,致使维修养护费用过高。
4 视频测速
目前较为先进的精确视频机动车测速系统主要采用了目标识别和目标跟踪技术。目标识别技术为图像的特征模式识别,其基本原理是对所要识别的目标特征进行详细的描述和建模。目标跟踪技术就是在一定区域范围内锁定目标。该技术应用在机动车测速方面,应保证在60m范围内不丢失机动车目标。
具体方法是,通过多路采集卡将测速摄像机的图像信号实时传送到计算机中进行实时分析处理。对图像进行目标识别,在判定出真正的目标后进行目标锁定并对锁定的目标进行实时跟踪,同时计算出车辆的精确位置并得出目标运动的矢量轨迹曲线图。每幅图的采集时间间隔固定不变,所以可得出两点之间十分精确的位移差和时间差,两者相除得出速度。
可见,不同原理的监测系统都有其各自的优缺点。雷达原理和地感线圈原理的监测系统在满足一定的测速准确度要求的条件下价格相对较低,因此在国内应用较为广泛。相信随着科学技术的进步和发展,各种原理的监测系统会更加完善,发挥各自的长处,为更好的维护道路交通安全服务。
上一页 [1] [2]